
PID控制原理详解:从基础概念到实际应用全面解析
时间:2025-09-03
来源:互联网
标签:
欢迎来到工业控制技术专栏,在这里您将看到关于PID控制原理的深度剖析。从数学公式到电机调速,从锅炉温度到无人机悬停,这种经典算法如何用三个参数解决90%的工业控制问题?以下是本文的探索路径:

当误差出现时,控制器在思考什么?
想象电热水壶正在加热,水温距离设定值还差15℃。比例环节(P)会立即输出一个与误差成正比的功率,就像司机看到红灯时踩刹车的力度。但纯比例控制永远存在静差——这正是积分环节(I)存在的意义,它默默累积那些被忽略的微小误差,像会计逐笔记录账目。至于微分环节(D),它敏锐捕捉温度变化趋势,在过热风险出现前就提前降低加热功率。
参数整定的艺术与科学
调参工程师的工具箱里藏着许多秘密:先用临界比例法确定系统震荡点,再根据Ziegler-Nichols公式计算初始参数。但真正的高手知道,理论值只是起点。某塑料挤出机的温度控制案例显示,将积分时间从3秒调整为3.2秒后,产品厚度波动立刻减小了37%——这0.2秒的差距,往往就是教科书不会告诉你的实战经验。
从实验室到生产线的蜕变
汽车装配线上的机械臂遇到突发负载变化时,传统PID会出现明显超调。这时需要串级控制结构,让内环快速响应扰动,外环保证最终定位精度。而化工反应釜的温度控制更棘手,大惯性系统要求将微分作用增强5倍,同时限制积分增长速度,这种特定场景下的参数组合,才是控制工程师的价值所在。
当经典算法遇见现代挑战
四旋翼无人机在抗风飞行时,单纯的PID控制会让电机疯狂振荡。此时需要将误差平方项引入控制律,或者采用模糊PID自适应策略。有意思的是,某医疗机器人项目最终发现:经过优化的传统PID,其轨迹跟踪精度比神经网络控制器高出12%,这提醒我们——新技术未必总是更好的选择。
藏在细节里的魔鬼
同样一套PID参数,在模拟仿真时表现完美,到现场却完全失灵?可能是采样周期设置不当。某水处理厂曾因将采样频率从100Hz改为50Hz,导致pH值控制出现周期性震荡。还有更隐蔽的问题:执行机构死区未补偿时,积分项会持续累积直到突破死区,然后系统突然剧烈动作——这类陷阱才是工程实践中最需要警惕的。
免责声明:以上内容仅为信息分享与交流,希望对您有所帮助
-
 江苏智慧人社退休人员认证如何操作 江苏智慧人社退休人员认证方法 时间:2026-01-16
江苏智慧人社退休人员认证如何操作 江苏智慧人社退休人员认证方法 时间:2026-01-16 -
 掌上同济app怎么买药 掌上同济买药流程 时间:2026-01-16
掌上同济app怎么买药 掌上同济买药流程 时间:2026-01-16 -
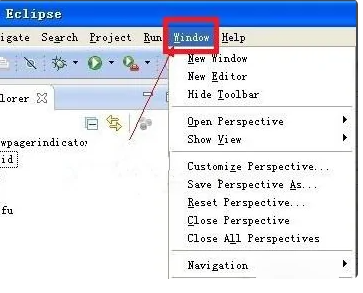 eclipse怎么调大字体 时间:2026-01-16
eclipse怎么调大字体 时间:2026-01-16 -
 中国电信翼支付怎么转人工服务 翼支付在线联系客服方法 时间:2026-01-16
中国电信翼支付怎么转人工服务 翼支付在线联系客服方法 时间:2026-01-16 -
 华为应用商店切换账号详细步骤 时间:2026-01-16
华为应用商店切换账号详细步骤 时间:2026-01-16 -
 抖音查看删除的聊天记录方法步骤 时间:2026-01-16
抖音查看删除的聊天记录方法步骤 时间:2026-01-16
今日更新
-
 群星纪元星球探索40怎么达成 星球探索40达成方法详细介绍
群星纪元星球探索40怎么达成 星球探索40达成方法详细介绍
阅读:18
-
 逆战未来破碎苍穹怎么打 破碎苍穹打法流程介绍
逆战未来破碎苍穹怎么打 破碎苍穹打法流程介绍
阅读:18
-
 胡闹地牢异界英雄选哪个 异界英雄选择推荐
胡闹地牢异界英雄选哪个 异界英雄选择推荐
阅读:18
-
 arcaea官网入口在哪-最新官网地址速递
arcaea官网入口在哪-最新官网地址速递
阅读:18
-
 逆战未来雷霆999P5E插件搭配推荐
逆战未来雷霆999P5E插件搭配推荐
阅读:18
-
 世界ol冰霜法术书怎么获得 世界ol冰霜法术书获得方法
世界ol冰霜法术书怎么获得 世界ol冰霜法术书获得方法
阅读:18
-
 境界刀鸣定向选择方法
境界刀鸣定向选择方法
阅读:18
-
 如鸢张绣角色怎么样
如鸢张绣角色怎么样
阅读:18
-
 伊莫克如何克制别人
伊莫克如何克制别人
阅读:18
-
 DNF2026血法技能数据是怎样的
DNF2026血法技能数据是怎样的
阅读:18